Welcome to SP's 2025 Open House (SPOH 2025) website! Dive into our exciting new features and content on the Courses and Admissions pages. See you at SPOH 2025!
The aim of this project is to develop a system that automates the manual pour-over coffee process. The project involves designing mechanical, electrical and programming solutions.
The manual pour-over coffee method relies heavily on the skill and knowledge of a barista. The goal of the project is to emulate barista expertise by ensuring precise water volume and by replicating the circular movement essential to the process.
Students working on the automatic Pour-over Coffee Machine
TEAM MEMBERS: Joshreen Triston Thavabal | Muhammad Shah Danial Bin Mohammed Adrian | Cheng Wen Ray Conrad
COURSE: Diploma in Mechanical Engineering
SCHOOL: Mechanical & Aeronautical Engineering
This project aims to design, develop or enhance an existing automation process station with storage and retrieval capability, as well as develop add-on mechanisms. Industrial protocols, cloud platform and dashboarding tools such as Azure, SQL Database and IoT protocols are explored to achieve horizontal and vertical integration.
TEAM MEMBERS: Lim Chin Loong| Koh Yun Ye | Uthayavanan S/O Sooriamoorthy | Kelvin Lim Guo Hui
COURSE: Diploma in Mechatronics & Robotics
SCHOOL: Mechanical & Aeronautical Engineering
The Smart Manufacturing Automation introduces a cutting-edge manufacturing solution designed to revolutionise the production process for High-Mix Low-Volume (HMLV) products. The innovative software streamlines the entire process from CAD model designing to CAM machining and CMM inspection, ensuring maximum efficiency and zero human intervention.
TEAM MEMBERS: Ervin Chai Kai Jun | Nicholas Chan Yu Fu | Koh Sin Hart | Muhammad Nawawi Bin Rosli | Phoon Zong Yuan Reyshawn
COURSE: Diploma in Mechanical Engineering
SCHOOL: Mechanical & Aeronautical Engineering
INDUSTRY PARTNER: Onn Wah Tech Pte Ltd
The project is about the integration of an Autonomous Mobile Robot (AMR) and a collaborative robot (Cobot) to transfer objects from one place to another autonomously. A mobile cart, on which the Cobot is mounted, is designed such that the AMR can attach and detach the mobile cart easily while preventing the Cobot from toppling over. The mobile cart mounted with the Cobot can easily be moved around by the AMR. The project includes the mapping and navigation of the AMR and the programming of the Cobot for picking and placing of objects using the built-in vision of the Cobot.
Students teaching the cobot for pick and place tasks
TEAM MEMBERS: Goh Jia Hao Shawn | Emy Mahirah Binte Mohammad Hazir | Chan Jia Hao
COURSE: Diploma in Mechanical Engineering
SCHOOL: Mechanical & Aeronautical Engineering
In collaboration with Advantest, this project showcases machine tending for an IC testing machine using mobile manipulators, departing from the limitations of fixed robots. This innovation empowers with the flexibility needed to adapt to Industry 4.0.
By deploying a mobile manipulator for IC testing machine tending, the solution not only reduce manpower requirements but also optimise power consumption through self-charging capabilities. This leads to enhanced productivity and resource efficiency.
Mobile manipulators and mobile robots being calibrated by students
Fleet of mobile manipulators developed by SP students
TEAM MEMBERS: Ahmad Azharul Islam Bin Muhammad Ghazzali Abdullah | Chang Yong Quan | Chia Zhi Feng | Emanuel Joseph Rodrigues | Jefferson Pan Wei Quan | Jonathan Teh Hock Lee | Muhammad Danish Bin Sulaimi | Mahesh S Kunalan | Ng Yan En | Nur Shazriqah Binte Atsani | Sebastian Aquino Rivera | Tan Tian Kovan | Tristan Eric Tay Kah Yik
COURSE: Diploma in Computer Engineering | Diploma in Electrical & Electronic Engineering | Diploma in Engineering with Business
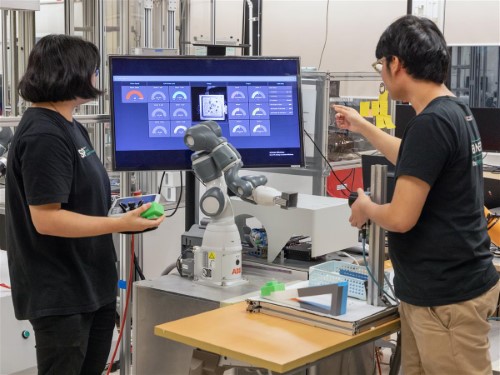
This project enables advanced maintenance for asset and equipment using digitalization, machine learning, web applications and real-time data.
Using the React framework, this solution offers real-time data visualization and machine learning-based anomaly detection. Real-world data from industrial settings validates the integrated approach, offering a robust solution for equipment health management, reducing downtime and cost.
Students adjusting a robotic arm and monitoring the status from a dashboard
Dashboard to monitor the robotic arm and sensor's condition